The base abstract class for e-puck motors. More...
Public Member Functions | |
| EpuckMotor (ConfigurationParameters ¶ms, QString prefix) | |
| Constructor. More... | |
| virtual | ~EpuckMotor () |
| Destructor. More... | |
| virtual void | save (ConfigurationParameters ¶ms, QString prefix) |
| Saves the parameters of the sensor into the ConfigurationParameters object. More... | |
 Public Member Functions inherited from Motor Public Member Functions inherited from Motor | |
| Motor (ConfigurationParameters ¶ms, QString prefix) | |
| Constructor and Configure. More... | |
| ~Motor () | |
| Destructor. More... | |
| QString | name () |
| Return the name of the Sensor. More... | |
| void | save (ConfigurationParameters ¶ms, QString prefix) |
| Save the parameters into the ConfigurationParameters. More... | |
| void | setName (QString name) |
| Use this method for changing the name of the Sensor. More... | |
| virtual int | size ()=0 |
| Return the number of neurons from which the Motor will get the output. More... | |
| virtual void | update ()=0 |
| Update the state of the Motor every time step; the actual behaviour is implemented in subclasses. More... | |
| Public Member Functions inherited from NoisyDevice | |
| NoisyDevice (ConfigurationParameters ¶ms, QString prefix) | |
| Constructor and Configure. More... | |
| ~NoisyDevice () | |
| Destructor. More... | |
| Public Member Functions inherited from ParameterSettableInConstructor | |
| ParameterSettableInConstructor (ConfigurationParameters &, QString) | |
| Public Member Functions inherited from ParameterSettable | |
| void | addObserver (RuntimeParameterObserver *obs) |
| T | getRuntimeParameter (QString paramName) |
| virtual ParameterSettableUI * | getUIManager () |
| virtual void | postConfigureInitialization () |
| void | removeObserver (RuntimeParameterObserver *obs) |
| void | setRuntimeParameter (QString paramName, T newvalue) |
| QString | typeName () const |
| Public Member Functions inherited from ConcurrentResourcesUser | |
| void | addUsableResource (QString resource) |
| void | addUsableResources (QStringList resources) |
| void | declareResource (QString name, T *resource, QString lockBuddy="") |
| void | deleteResource (QString name) |
| T * | getResource (QString name, bool *resourceExists=NULL) |
| bool | hasResource (QString name) const |
| void | removeAllUsableResources () |
| void | removeUsableResource (QString resource) |
| void | removeUsableResources (QStringList resources) |
| virtual void | shareResourcesWith (ResourcesUser *buddy) |
| void | usableResources (QStringList resources) |
| bool | usedResourcesExist (QStringList *nonExistingResources=NULL) const |
Static Public Member Functions | |
| static void | describe (QString type) |
| Describes all the parameters for this sensor. More... | |
| Static Public Member Functions inherited from Motor | |
| static void | describe (QString type) |
| Describe all the parameter for configuring the Motor. More... | |
| Static Public Member Functions inherited from NoisyDevice | |
| static void | describe (QString type) |
| Describe all the parameter for configuring the Sensor. More... | |
| Static Public Member Functions inherited from ParameterSettable | |
| static void | describe (QString type) |
| static QString | fullParameterDescriptionPath (QString type, QString param) |
| static QString | fullSubgroupDescriptionPath (QString type, QString sub) |
Protected Member Functions | |
| virtual void | resourceChanged (QString resourceName, ResourceChangeType changeType) |
| The function called when a resource used here is changed. More... | |
| Protected Member Functions inherited from Motor | |
| QString | actualResourceNameForMultirobot (QString resourceName) const |
| Returns the actual resource name to use. More... | |
| void | checkAllNeededResourcesExist () |
| Checks whether all resources we need are existing and throws an exception if they aren't. More... | |
| void | resetNeededResourcesCheck () |
| Resets the check on needed resources so that the next call to checkAllNeededResourcesExist() will perform the full check and not the quick one. More... | |
| Protected Member Functions inherited from NoisyDevice | |
| double | applyNoise (double v, double minValue, double maxValue) const |
| Adds noise to the value. More... | |
| Protected Member Functions inherited from ParameterSettable | |
| void | notifyChangesToParam (QString paramName) |
| Protected Member Functions inherited from ConcurrentResourcesUser | |
| T * | getResource () |
| Protected Member Functions inherited from ResourcesUser | |
| ResourcesUser (const ResourcesUser &other) | |
| virtual void | notifyResourceChange (ResourceHandler *resource, ResourceChangeType changeType)=0 |
| ResourcesUser & | operator= (const ResourcesUser &other) |
Protected Attributes | |
| QString | m_epuckResource |
| The name of the resource associated with the e-puck robot. More... | |
| QString | m_neuronsIteratorResource |
| The name of th resource associated with the neural network iterator. More... | |
| Protected Attributes inherited from ResourcesUser | |
| ResourceCollectionHolder | m_resources |
Additional Inherited Members | |
| Public Types inherited from ParameterSettable | |
| enum | Property |
| Public Types inherited from ResourcesUser | |
| typedef Resource::ResourceChangeType | ResourceChangeType |
| Public Types inherited from Resource | |
| enum | ResourceChangeType |
| Public Attributes inherited from ParameterSettable | |
| AllowMultiple | |
| Default | |
| IsList | |
| IsMandatory | |
| Static Public Attributes inherited from ParameterSettable | |
| static const double | Infinity |
| static const int | MaxInteger |
| static const int | MinInteger |
| Static Protected Member Functions inherited from ParameterSettable | |
| static Descriptor | addTypeDescription (QString type, QString shortHelp, QString longHelp=QString("")) |
| static void | setGraphicalEditor (QString type) |
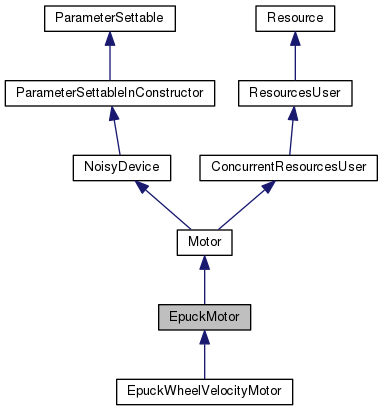
Detailed Description
The base abstract class for e-puck motors.
This class simply has a couple of parameters that are common to all e-puck motors (see below).
In addition to all parameters defined by the parent class (Motor), this class also defines the following parameters:
- epuck: the name of the resource associated with the MarXbot robot to use (default is "robot")
- neuronsIterator: the name of the resource associated with the neural network iterator (default is "neuronsIterator")
The resources required by this Motor are:
- name defined by the epuck parameter: the simulated physical e-puck robot
- name defined by the neuronsIterator parameter: the object to iterate over neurons of the neural network
Definition at line 52 of file epuckmotors.h.
Constructor & Destructor Documentation
| EpuckMotor | ( | ConfigurationParameters & | params, |
| QString | prefix | ||
| ) |
Constructor.
This also reads configuration parameters. Moreover this adds the e-puck and neuronsIterator resources to the list of resources used here
- Parameters
-
params the ConfigurationParameters containing the parameters for the sensor prefix the path prefix to the paramters for this sensor
Definition at line 30 of file epuckmotors.cpp.
References Motor::actualResourceNameForMultirobot(), ConfigurationHelper::getString(), EpuckMotor::m_epuckResource, EpuckMotor::m_neuronsIteratorResource, and ConcurrentResourcesUser::usableResources().
|
virtual |
Destructor.
Definition at line 43 of file epuckmotors.cpp.
Member Function Documentation
|
static |
Describes all the parameters for this sensor.
- Parameters
-
type the name with which this sensor is registered into the factory
Definition at line 59 of file epuckmotors.cpp.
References ParameterSettable::addTypeDescription(), and Motor::describe().
Referenced by EpuckWheelVelocityMotor::describe().
|
protectedvirtual |
The function called when a resource used here is changed.
- Parameters
-
resourceName the name of the resource that has changed. chageType the type of change the resource has gone through (whether it was created, modified or deleted)
Reimplemented from ConcurrentResourcesUser.
Definition at line 70 of file epuckmotors.cpp.
References Motor::resetNeededResourcesCheck(), and ConcurrentResourcesUser::resourceChanged().
|
virtual |
Saves the parameters of the sensor into the ConfigurationParameters object.
- Parameters
-
params the ConfigurationParameters where save the parameters of the sensors prefix the path prefix for the parameters to save
Implements ParameterSettable.
Reimplemented in EpuckWheelVelocityMotor.
Definition at line 48 of file epuckmotors.cpp.
References ConfigurationParameters::createParameter(), EpuckMotor::m_epuckResource, EpuckMotor::m_neuronsIteratorResource, Motor::save(), and ConfigurationParameters::startObjectParameters().
Referenced by EpuckWheelVelocityMotor::save().
Member Data Documentation
|
protected |
The name of the resource associated with the e-puck robot.
Definition at line 104 of file epuckmotors.h.
Referenced by EpuckMotor::EpuckMotor(), and EpuckMotor::save().
|
protected |
The name of th resource associated with the neural network iterator.
Definition at line 110 of file epuckmotors.h.
Referenced by EpuckMotor::EpuckMotor(), and EpuckMotor::save().
The documentation for this class was generated from the following files:
- experiments/include/epuckmotors.h
- experiments/src/epuckmotors.cpp